Relay dynamics simulation using PHP and QuickField Object Model - QuickField simulation example
The electromagnetic and spring forces act on the plunger. Both forces depend on the plunger position. Calculate plunger motion function.
To combine the electromagnetic field analysis with the moving core dynamics both PHP and QuickField are used. Interaction between QuickField and PHP is performed using ActiveField application programming interface.
How to find relay armature motion?
Answer Typical applications Geometry
Given
Task
Solution
The motion function can be found from second-order differential equation
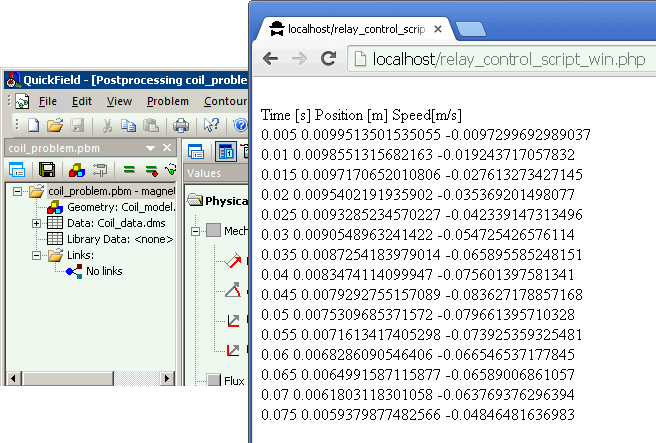
The equations are solved in PHP. The dynamic link through COM is used to invoke QuickField and calculate the electromagnetic force at each step.
The calculations are stopped when x=xmin (pull in position, plunger hits damper).
Results
Engineering question
Set up an axisymmetric QuickField DC Magnetics problem for a relay armature and evaluate motion from computed field results.
electromagnetic relays, relay armatures, electromechanical switching devices
Download
Simulation problem
Problem Type
Axisymmetric problem of DC magnetics.
Current I = 400 Ampere*turns;
Plunger pull-out position xmax = 10 mm.
Plunger pull in position xmin = 6 mm.
Plunger weight m = 4.5 g;
Spring constant k = 4 N/m
Spring free position xspring.free = 15 mm.
The electromagnetic and spring forces act on the plunger. Both forces depend on the plunger position. Calculate plunger motion function.
The multi-turn winding is replaced with the equivalent total current.
m · d²x/dt² = f(x),
where m - is a plunger weight (kg),
x - is a plunger position (m)
f(x) - is the force acting on the plunger (N).
The force acting on the plunger is a sum of spring force fspring(x) = k·(xspring.free - x) and electromagnetic force.
The plunger hits initial position at 0.075 s.
Related examples